ແຂນຫຸ່ນຍົນຮ່ວມມືອຸດສາຫະກໍາ 6 ແກນສໍາລັບການຫຸ້ມຫໍ່


ແຂນຫຸ່ນຍົນຮ່ວມມືອຸດສາຫະກໍາ 6 ແກນສໍາລັບການຫຸ້ມຫໍ່
ໝວດໝູ່ຫຼັກ
AGV AMR / ຍົກເຄື່ອງຍົກ AGV AMR / ຍານພາຫະນະນຳທາງອັດຕະໂນມັດ AGV / ຫຸ່ນຍົນເຄື່ອນທີ່ອັດຕະໂນມັດ AMR / ລົດ AGV AMR ສຳລັບການຈັດການວັດສະດຸອຸດສາຫະກຳ / ຜູ້ຜະລິດຈີນ ຫຸ່ນຍົນ AGV / ສາງ AMR / ການນຳທາງດ້ວຍເລເຊີ SLAM ຂອງ AMR / ຫຸ່ນຍົນເຄື່ອນທີ່ AGV AMR / ການນຳທາງດ້ວຍເລເຊີ SLAM ຂອງໂຄງລົດ AGV AMR / ຫຸ່ນຍົນຂົນສົ່ງອັດສະລິຍະ
ແອັບພລິເຄຊັນ

ໂຄງລົດບໍ່ມີຄົນຂັບຊຸດ AMB AMB (ຖານເຄື່ອນທີ່ອັດຕະໂນມັດ) ສຳລັບຍານພາຫະນະອັດຕະໂນມັດ agv, ໂຄງລົດທົ່ວໄປທີ່ອອກແບບມາສຳລັບຍານພາຫະນະຂັບເຄື່ອນດ້ວຍຕົນເອງ agv, ມີຄຸນສົມບັດບາງຢ່າງເຊັ່ນ: ການແກ້ໄຂແຜນທີ່ ແລະ ການນຳທາງທ້ອງຖິ່ນ. ໂຄງລົດບໍ່ມີຄົນຂັບສຳລັບລົດເຂັນ agv ນີ້ໃຫ້ອິນເຕີເຟດຂອບເຂດທີ່ອຸດົມສົມບູນເຊັ່ນ: I/O ແລະ CAN ເພື່ອຕິດຕັ້ງໂມດູນດ້ານເທິງຕ່າງໆພ້ອມກັບຊອບແວລູກຄ້າທີ່ມີປະສິດທິພາບ ແລະ ລະບົບການແຈກຢາຍເພື່ອຊ່ວຍໃຫ້ຜູ້ໃຊ້ສຳເລັດການຜະລິດ ແລະ ການນຳໃຊ້ຍານພາຫະນະຂັບເຄື່ອນດ້ວຍຕົນເອງ agv ໄດ້ຢ່າງວ່ອງໄວ. ມີຮູຕິດຕັ້ງສີ່ຮູຢູ່ເທິງສຸດຂອງໂຄງລົດບໍ່ມີຄົນຂັບຊຸດ AMB ສຳລັບຍານພາຫະນະຂັບເຄື່ອນດ້ວຍຕົນເອງ agv, ເຊິ່ງຮອງຮັບການຂະຫຍາຍແບບບໍ່ເປັນທາງການດ້ວຍການຍົກ, ລູກກິ້ງ, ຕົວຈັດການ, ການດຶງແຝງ, ການສະແດງຜົນ, ແລະອື່ນໆ ເພື່ອໃຫ້ບັນລຸການນຳໃຊ້ຫຼາຍຢ່າງຂອງໂຄງລົດດຽວ. AMB ຮ່ວມກັບ SEER Enterprise Enhanced Digitalization ສາມາດບັນລຸການຈັດສົ່ງ ແລະ ການນຳໃຊ້ຜະລິດຕະພັນ AMB ຫຼາຍຮ້ອຍຢ່າງແບບລວມສູນໃນເວລາດຽວກັນ, ເຊິ່ງປັບປຸງລະດັບຄວາມສະຫຼາດຂອງການຂົນສົ່ງພາຍໃນ ແລະ ການຂົນສົ່ງໃນໂຮງງານຢ່າງຫຼວງຫຼາຍ.
ຄຸນສົມບັດ
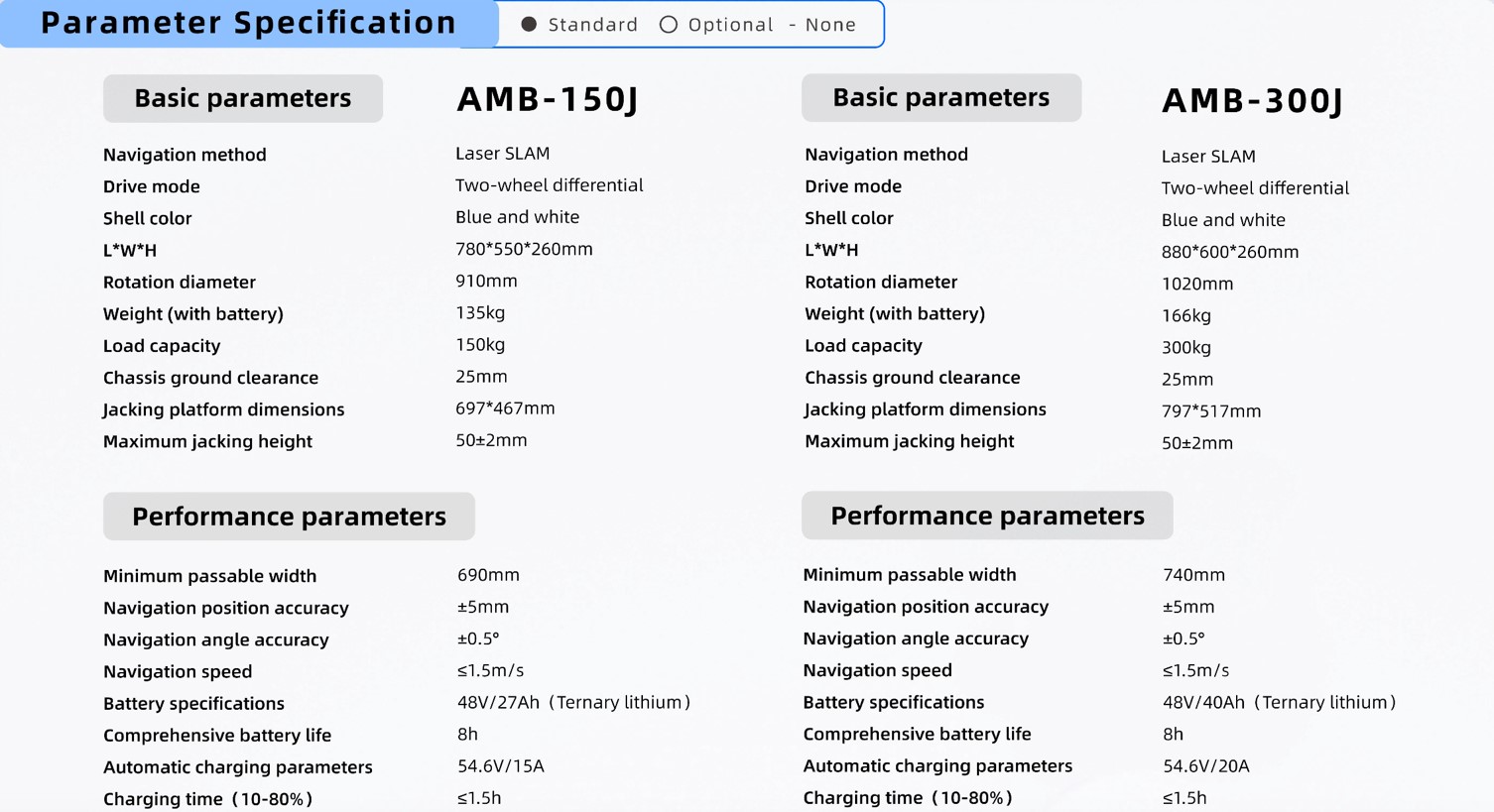
・ຮັບນ້ຳໜັກໄດ້ 150 ກິໂລກຣາມ ແລະ 300 ກິໂລກຣາມ
·ຄວາມສູງສູງສຸດຂອງການຍົກ: 50 ມມ
·ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງການນຳທາງ: ±5 ມມ
·ຄວາມຖືກຕ້ອງຂອງມຸມນຳທາງ: ±0.5°
● ມີຄຸນສົມບັດທີ່ຫຼາກຫຼາຍທີ່ມີໃຫ້ບໍລິການໄດ້ທຸກເວລາ
ຄຸນສົມບັດມາດຕະຖານທີ່ສົມບູນແບບ ແລະ ດີເລີດ ພ້ອມທັງຄຸນສົມບັດຂັ້ນສູງທີ່ອຸດົມສົມບູນ ແລະ ໃຊ້ໄດ້ຈິງ ຊ່ວຍໃຫ້ລູກຄ້າສາມາດບັນລຸເປົ້າໝາຍດ້ານການຂົນສົ່ງທີ່ສະຫຼາດໄດ້ຢ່າງງ່າຍດາຍ.
● ແພລດຟອມຫຼາຍສະເປັກມີໃຫ້ສຳລັບການຂະຫຍາຍ
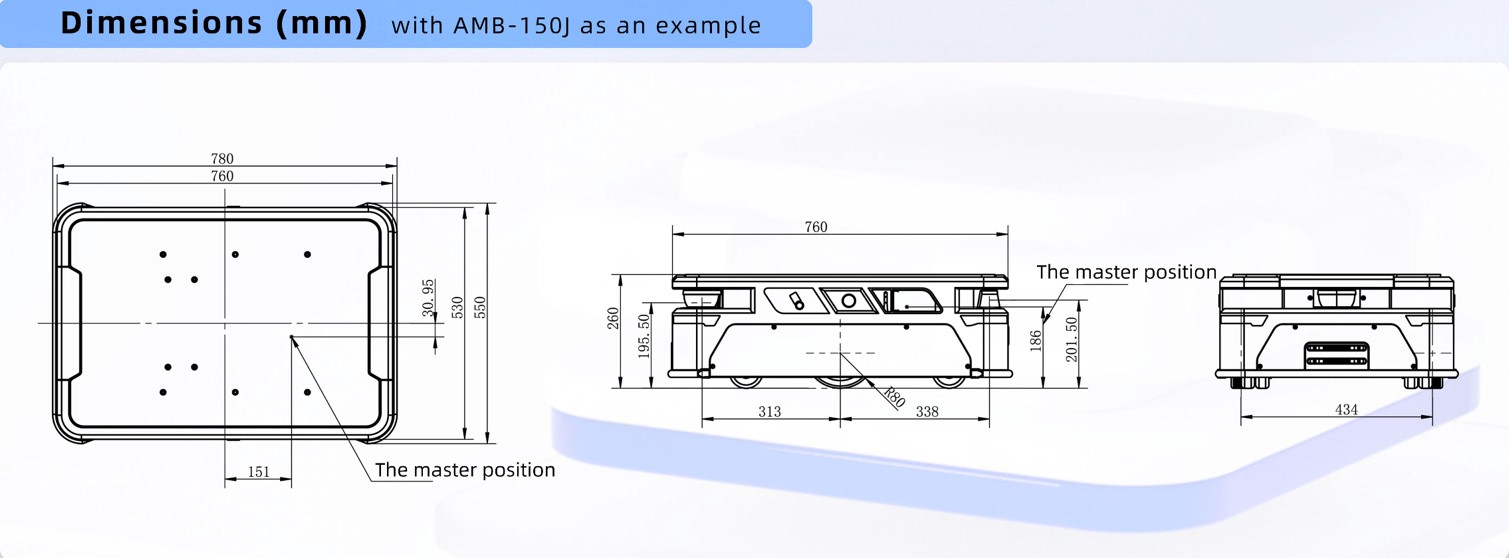
ສະໜອງແພລດຟອມ 150 ກິໂລກຣາມ ແລະ 300 ກິໂລກຣາມ ເພື່ອຕອບສະໜອງຄວາມຕ້ອງການດ້ານການຮັບນ້ຳໜັກ ແລະ ສະຖານະການຂອງອຸດສາຫະກຳຕ່າງໆ. ມັນຍັງສາມາດໃຊ້ກັບຕົວຈັດການ, ລູກກິ້ງ, ການຍົກ, ການດຶງແຝງ, ການເລື່ອນ/ອຽງ, ໜ້າຈໍສະແດງຜົນ, ແລະອື່ນໆ ເພື່ອໃຫ້ໄດ້ການນຳໃຊ້ຫຼາຍຢ່າງດ້ວຍຕົວຖັງດຽວ.
● ±5 ມມ, ມີປະສິດທິພາບ ແລະ ຖືກຕ້ອງ
ອັລກໍຣິທຶມເລເຊີ SLAM ຖືກນຳໃຊ້ເພື່ອບັນລຸການທ້ອງຖິ່ນທີ່ມີຄວາມແມ່ນຍຳສູງ, ໂດຍມີຄວາມຖືກຕ້ອງຂອງການກຳນົດຕຳແໜ່ງຊ້ຳໆແບບບໍ່ສະທ້ອນດ້ວຍເລເຊີພາຍໃນ ±5 ມມ, ເຮັດໃຫ້ສາມາດເຊື່ອມຕໍ່ກັນໄດ້ຢ່າງລຽບງ່າຍລະຫວ່າງຫຸ່ນຍົນເຄື່ອນທີ່ ແລະ ມະນຸດ, ແລະ ມີການໄຫຼວຽນຂອງສິນຄ້າຢ່າງມີປະສິດທິພາບລະຫວ່າງຈຸດຕ່າງໆ. ໝາຍເຫດ: ຄ່າຕົວຈິງແມ່ນຂຶ້ນກັບສະພາບແວດລ້ອມ.
● ການນຳທາງທີ່ໝັ້ນຄົງເພື່ອຄວາມປອດໄພ ແລະ ຄວາມໜ້າເຊື່ອຖື
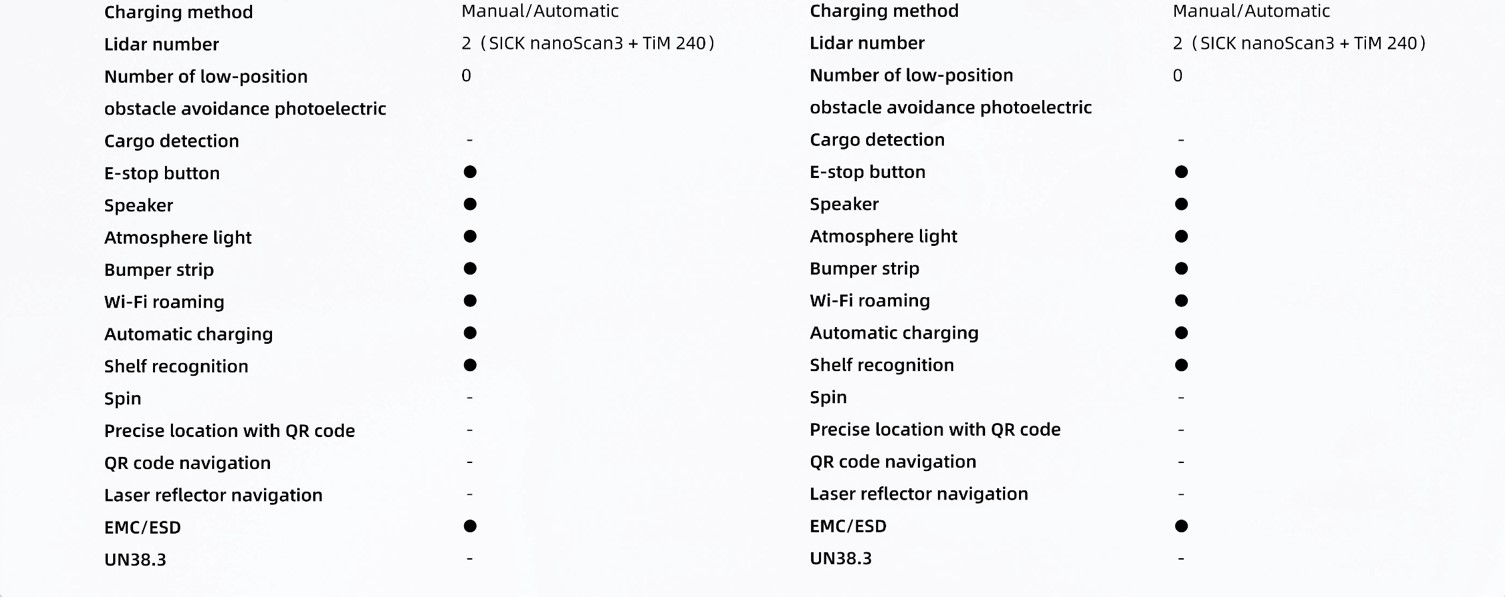
ການນຳທາງດ້ວຍເລເຊີ SLAM, ການນຳທາງດ້ວຍເລເຊີສະທ້ອນແສງ, ການນຳທາງດ້ວຍລະຫັດ QR ແລະ ວິທີການນຳທາງອື່ນໆແມ່ນປະສົມປະສານຢ່າງສົມບູນແບບ ແລະ ສະຫຼັບກັນໄດ້ຢ່າງລຽບງ່າຍເພື່ອຮັບປະກັນການເຮັດວຽກທີ່ໝັ້ນຄົງຂອງຫຸ່ນຍົນມືຖື.
● ການນຳໃຊ້ງ່າຍ ແລະ ການຄຸ້ມຄອງທີ່ເບິ່ງເຫັນໄດ້ຊັດເຈນ
ຊອບແວສະໜັບສະໜູນ ແລະ ລະບົບດິຈິຕອນທີ່ຫຼາກຫຼາຍສາມາດຮັບຮູ້ການດຳເນີນງານ, ການກຳນົດເວລາ ແລະ ການຄຸ້ມຄອງຂໍ້ມູນຂອງຫຸ່ນຍົນເຄື່ອນທີ່ໄດ້ຢ່າງງ່າຍດາຍ, ແລະ ເຊື່ອມຕໍ່ກັບລະບົບ MES ຂອງໂຮງງານໄດ້ຢ່າງບໍ່ມີຂໍ້ບົກຜ່ອງເພື່ອຮັບຮູ້ການຂົນສົ່ງອັດສະລິຍະຢ່າງແທ້ຈິງ.
ຜະລິດຕະພັນທີ່ກ່ຽວຂ້ອງ



ພາລາມິເຕີສະເປັກ
ທຸລະກິດຂອງພວກເຮົາ





