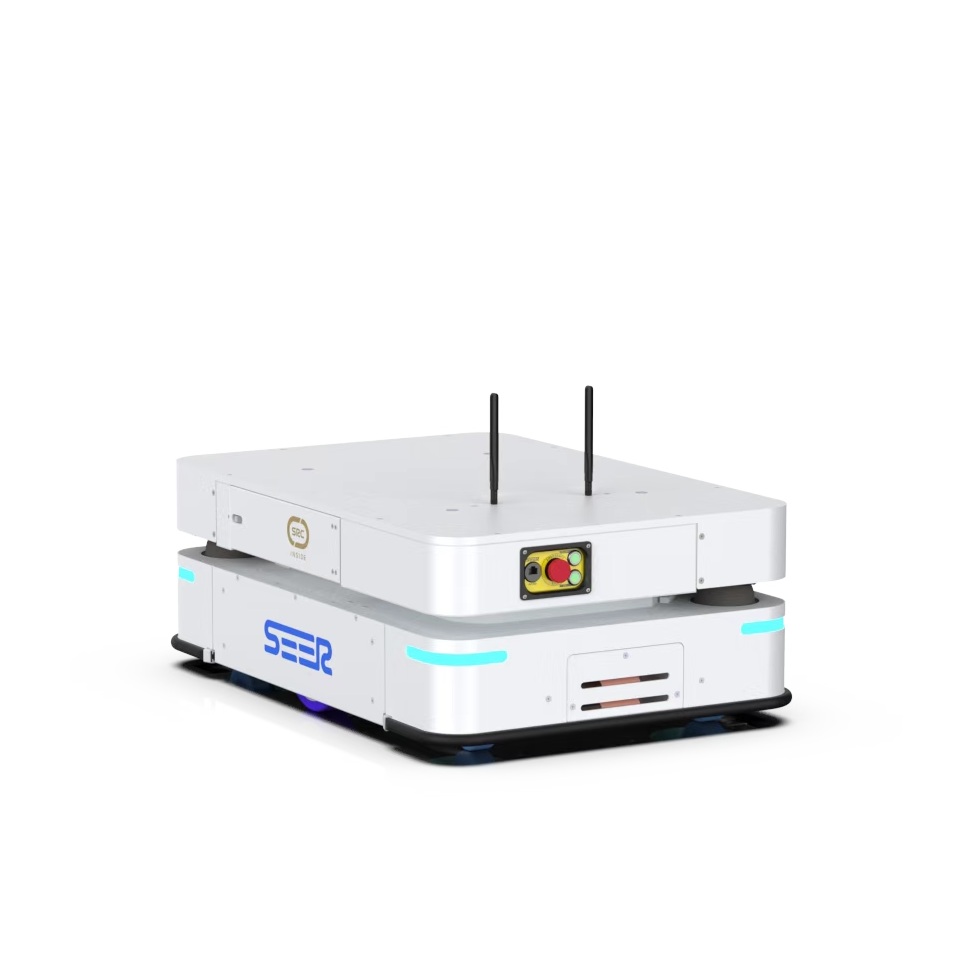
AMRS ມາດຕະຖານ – ຖານໂທລະສັບມືຖືອັດຕະໂນມັດ AMB-300XS

ໝວດໝູ່ຫຼັກ
AGV AMR / ຍົກເຄື່ອງຍົກ AGV AMR / ຍານພາຫະນະນຳທາງອັດຕະໂນມັດ AGV / ຫຸ່ນຍົນເຄື່ອນທີ່ອັດຕະໂນມັດ AMR / ລົດ AGV AMR ສຳລັບການຈັດການວັດສະດຸອຸດສາຫະກຳ / ຜູ້ຜະລິດຈີນ ຫຸ່ນຍົນ AGV / ສາງ AMR / ການນຳທາງດ້ວຍເລເຊີ SLAM ຂອງ AMR / ຫຸ່ນຍົນເຄື່ອນທີ່ AGV AMR / ການນຳທາງດ້ວຍເລເຊີ SLAM ຂອງໂຄງລົດ AGV AMR / ຫຸ່ນຍົນຂົນສົ່ງອັດສະລິຍະ
ແອັບພລິເຄຊັນ

ໂຄງລົດບໍ່ມີຄົນຂັບຊຸດ AMB AMB (ຖານເຄື່ອນທີ່ອັດຕະໂນມັດ) ສຳລັບຍານພາຫະນະອັດຕະໂນມັດ agv, ໂຄງລົດທົ່ວໄປທີ່ອອກແບບມາສຳລັບຍານພາຫະນະທີ່ມີລະບົບນຳພາດ້ວຍຕົນເອງ agv, ມີຄຸນສົມບັດບາງຢ່າງເຊັ່ນ: ການແກ້ໄຂແຜນທີ່ ແລະ ການນຳທາງທ້ອງຖິ່ນ. ໂຄງລົດບໍ່ມີຄົນຂັບສຳລັບລົດເຂັນ agv ນີ້ໃຫ້ອິນເຕີເຟດຂອບເຂດທີ່ອຸດົມສົມບູນເຊັ່ນ: I/O ແລະ CAN ເພື່ອຕິດຕັ້ງໂມດູນດ້ານເທິງຕ່າງໆພ້ອມກັບຊອບແວລູກຄ້າທີ່ມີປະສິດທິພາບ ແລະ ລະບົບການແຈກຢາຍເພື່ອຊ່ວຍໃຫ້ຜູ້ໃຊ້ສຳເລັດການຜະລິດ ແລະ ການນຳໃຊ້ຍານພາຫະນະອັດຕະໂນມັດ agv ໄດ້ຢ່າງວ່ອງໄວ. ມີຮູຕິດຕັ້ງສີ່ຮູຢູ່ເທິງສຸດຂອງໂຄງລົດບໍ່ມີຄົນຂັບຊຸດ AMB ສຳລັບຍານພາຫະນະທີ່ມີລະບົບນຳພາດ້ວຍຕົນເອງ agv, ເຊິ່ງຮອງຮັບການຂະຫຍາຍແບບບໍ່ເປັນທາງການດ້ວຍການຍົກ, ລູກກິ້ງ, ຕົວຈັດການ, ການດຶງແຝງ, ການສະແດງຜົນ, ແລະອື່ນໆ ເພື່ອໃຫ້ບັນລຸການນຳໃຊ້ຫຼາຍຢ່າງຂອງໂຄງລົດດຽວ. AMB ຮ່ວມກັບ SEER Enterprise Enhanced Digitalization ສາມາດບັນລຸການຈັດສົ່ງ ແລະ ການນຳໃຊ້ຜະລິດຕະພັນ AMB ຫຼາຍຮ້ອຍຢ່າງແບບລວມສູນໃນເວລາດຽວກັນ, ເຊິ່ງປັບປຸງລະດັບຄວາມສະຫຼາດຂອງການຂົນສົ່ງພາຍໃນ ແລະ ການຂົນສົ່ງໃນໂຮງງານຢ່າງຫຼວງຫຼາຍ.
ຄຸນສົມບັດ

· ນ້ຳໜັກທີ່ໄດ້ຮັບການຈັດອັນດັບ: 300 ກິໂລກຣາມ
· ເວລາແລ່ນ: 12 ຊົ່ວໂມງ
· ໝາຍເລກ Lidar: 2
ເສັ້ນຜ່າສູນກາງການໝຸນ: 972.6 ມມ
· ຄວາມໄວໃນການນຳທາງ: ≤1.5m/s
· ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງ: ±5,0.5 ມມ
● ໄດ້ຮັບການຮັບຮອງຄວາມປອດໄພຈາກ CE, ປະສິດທິພາບທີ່ໂດດເດັ່ນ ແລະ ມາດຕະຖານຄວາມປອດໄພທີ່ດີເລີດໂດຍການອອກແບບ
ການຮັບຮອງ CE (ISO 3691-4:2020) ໃຫ້ການຮັບປະກັນຄຸນນະພາບ ແລະ ຄວາມປອດໄພໃນລະດັບສູງສຸດ, ເຊິ່ງສະໜັບສະໜູນການສົ່ງອອກ.
I/O, CAN, RS485 ແລະ ອິນເຕີເຟດອື່ນໆແມ່ນສະຫງວນໄວ້ສຳລັບການຂະຫຍາຍກົນໄກລະດັບສູງ, ເຊິ່ງສາມາດຮັບຮູ້ການນຳໃຊ້ຫຸ່ນຍົນຕ່າງໆໄດ້.
● ຕຳແໜ່ງທີ່ຖືກຕ້ອງ ±5 ມມ
ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງການນຳທາງ ±5 ມມ ແລະ ຄວາມໄວໃນການນຳທາງ 1.5 ແມັດ/ວິນາທີ ຊ່ວຍໃຫ້ວິສາຫະກິດເຮັດວຽກໄດ້ຢ່າງມີປະສິດທິພາບ.
● ໜ້າທີ່ໂດຍລວມ ແລະ ການຂະຫຍາຍທີ່ບໍ່ມີບັນຫາ
ໜ້າທີ່ພື້ນຖານປະກອບມີການແກ້ໄຂແຜນທີ່, ການແກ້ໄຂຮູບແບບ, ການກຳນົດຕຳແໜ່ງ ແລະ ການນຳທາງ, ຮູບແບບການເຄື່ອນໄຫວພື້ນຖານ (ດິຟເຟີເຣນຊຽລ), ສ່ວນຂະຫຍາຍອຸປະກອນຕໍ່ພ່ວງ (ລູກກິ້ງ, ການຍົກ, ການດຶງແຝງ), ການໂຕ້ຕອບ, ແລະອື່ນໆ.
● ຄວາມສະອາດຊັ້ນ 4, ໜ້າເຊື່ອຖືກວ່າ
ຜ່ານການທົດສອບຄວາມສະອາດ ISO CLASS4, ສາມາດນຳໃຊ້ໂດຍກົງໃນອຸດສາຫະກຳທີ່ມີຄວາມຕ້ອງການຄວາມສະອາດສູງ ເຊັ່ນ: ເຄິ່ງຕົວນຳ.
● ການກວດຈັບອຸປະສັກ 3D, ປອດໄພກວ່າ
ການກວດສອບອຸປະສັກແບບ 3D ແລະ ການນຳທາງດ້ວຍຕົວສະທ້ອນແສງແມ່ນໄດ້ຮັບການຮອງຮັບເພື່ອເສີມຂະຫຍາຍປະສິດທິພາບດ້ານຄວາມປອດໄພຂອງຜະລິດຕະພັນໃຫ້ດີຂຶ້ນ.



ພາລາມິເຕີສະເປັກ
| ຮູບແບບຜະລິດຕະພັນ | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| ພາລາມິເຕີພື້ນຖານ | ວິທີການນຳທາງ | ເລເຊີສະແລມ | ເລເຊີສະແລມ | ເລເຊີສະແລມ |
| ໂໝດຂັບຂີ່ | ດິຟເຟີເຣນຊຽລສອງລໍ້ | ດິຟເຟີເຣນຊຽລສອງລໍ້ | ດິຟເຟີເຣນຊຽລສອງລໍ້ | |
| ສີຂອງເປືອກຫອຍ | ສີຂາວມຸກ / ສີດຳມຸກ | ສີຂາວມຸກ / ສີດຳມຸກ | RAL9003 | |
| ຍ*ກ*ສ (ມມ) | 800*560*200 | 1000*700*200 | 842*582*300 | |
| ເສັ້ນຜ່າສູນກາງການໝຸນ (ມມ) | 840 | 1040 | 972.6 | |
| ນ້ຳໜັກ (ພ້ອມແບັດເຕີຣີ)(ກິໂລກຣາມ) | 66 | 144 | 120 | |
| ຄວາມສາມາດໃນການໂຫຼດ (ກິໂລກຣາມ) | 150 | 300 | 300 | |
| ຄວາມກວ້າງຕໍ່າສຸດທີ່ຜ່ານໄປໄດ້ (ມມ) | 700 | 840 | 722 | |
| ພາລາມິເຕີປະສິດທິພາບ | ||||
| ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງການນຳທາງ (ມມ*) | ±5 | ±5 | ±5 | |
| ຄວາມຖືກຕ້ອງຂອງມຸມນຳທາງ (°) | ±0.5 | ±0.5 | ±0.5 | |
| ຄວາມໄວໃນການນຳທາງ (ມ/ວິນາທີ) | ≤1.4 | ≤1.4 | ≤1.5 | |
| ພາລາມິເຕີແບັດເຕີຣີ | ລາຍລະອຽດຂອງແບັດເຕີຣີ (V/Ah) | 48/35 (ລິທຽມສາມຊັ້ນ) | 48/52 (ລິທຽມສາມຊັ້ນ) | 48/40 (ລິທຽມສາມຊັ້ນ) |
| ອາຍຸການໃຊ້ງານແບັດເຕີຣີທີ່ສົມບູນແບບ (ຊົ່ວໂມງ) | 12 | 12 | 12 | |
| ເວລາສາກໄຟ (10-80%) (10-80%) (ຊມ) | ≤2 | ≤ 2.5 | ≤ 2.5 | |
| ວິທີການສາກໄຟ | ຄູ່ມື/ອັດຕະໂນມັດ/ສະວິດ | ຄູ່ມື/ອັດຕະໂນມັດ/ສະວິດ | ຄູ່ມື/ອັດຕະໂນມັດ/ສະວິດ | |
| ອິນເຕີເຟດທີ່ຂະຫຍາຍອອກ | ພະລັງງານ DO | ເຈັດທາງ (ຄວາມສາມາດໃນການໂຫຼດທັງໝົດ 24V/2A) | ເຈັດທາງ (ຄວາມສາມາດໃນການໂຫຼດທັງໝົດ 24V/2A) | ສາມທາງ (ຄວາມສາມາດໃນການໂຫຼດທັງໝົດ 24V/2A) |
| DI | ສິບທາງ (NPN) | ສິບທາງ (NPN) | ສິບເອັດທາງ (PNP/NPN) | |
| ອິນເຕີເຟດ E-stop | ຜົນຜະລິດສອງທາງ | ຜົນຜະລິດສອງທາງ | ຜົນຜະລິດສອງທາງ | |
| ເຄືອຂ່າຍແບບມີສາຍ | ອີເທີເນັດກິກະບິດ RJ45 ສາມທາງ | ອີເທີເນັດກິກະບິດ RJ45 ສາມທາງ | ອີເທີເນັດກິກະບິດ M12 X-Code ສອງທາງ | |
| ການຕັ້ງຄ່າ | ໝາຍເລກ Lidar | 1 ຫຼື 2 | 1 ຫຼື 2 | 2(SICK nanoScan3) |
| ຈໍສະແດງຜົນ HMI | ● | ● | - | |
| ປຸ່ມຢຸດອີເລັກໂທຣນິກ | ● | ● | ● | |
| ບັສເຊີ | ● | ● | - | |
| ຜູ້ເວົ້າ | ● | ● | ● | |
| ແສງອ້ອມຂ້າງ | ● | ● | ● | |
| ແຖບກັນຊົນ | - | - | ● | |
| ຟັງຊັນຕ່າງໆ | ການໂຣມມິງ Wi-Fi | ● | ● | ● |
| ການສາກໄຟອັດຕະໂນມັດ | ● | ● | ● | |
| ການຮັບຮູ້ຊັ້ນວາງ | ● | ● | ● | |
| ການນຳທາງດ້ວຍເລເຊີສະທ້ອນແສງ | 〇 | 〇 | 〇 | |
| ການຫຼີກລ່ຽງອຸປະສັກແບບ 3D | 〇 | 〇 | 〇 | |
| ໃບຢັ້ງຢືນ | ISO 3691-4 | - | - | ● |
| EMC/ESD | ● | ● | ● | |
| UN38.3 | ● | ● | ● | |
| ຄວາມສະອາດ | - | ISO ຊັ້ນ 4 | ISO ຊັ້ນ 4 | |
* ຄວາມຖືກຕ້ອງຂອງການນຳທາງມັກຈະໝາຍເຖິງຄວາມຖືກຕ້ອງຂອງການເຮັດຊ້ຳຄືນທີ່ຫຸ່ນຍົນນຳທາງໄປຫາສະຖານີ.
● ມາດຕະຖານ 〇 ທາງເລືອກ ບໍ່ມີ
ທຸລະກິດຂອງພວກເຮົາ







