ຊຸດກຣິບເປີໄຟຟ້າ HITBOT – ກຣິບເປີໄຟຟ້າຂະໜານ Z-EFG-26



ໝວດໝູ່ຫຼັກ
ແຂນຫຸ່ນຍົນອຸດສາຫະກຳ / ແຂນຫຸ່ນຍົນຮ່ວມມື / ກຣິບເປີໄຟຟ້າ / ຕົວກະຕຸ້ນອັດສະລິຍະ / ວິທີແກ້ໄຂອັດຕະໂນມັດ
ແອັບພລິເຄຊັນ
ເຄື່ອງຈັບຫຸ່ນຍົນຊຸດ SCIC Z-EFG ມີຂະໜາດນ້ອຍພ້ອມດ້ວຍລະບົບ servo ໃນຕົວ, ເຊິ່ງເຮັດໃຫ້ສາມາດຄວບຄຸມຄວາມໄວ, ຕຳແໜ່ງ ແລະ ແຮງໜີບໄດ້ຢ່າງແນ່ນອນ. ລະບົບຈັບທີ່ທັນສະໄໝຂອງ SCIC ສຳລັບວິທີແກ້ໄຂອັດຕະໂນມັດຈະຊ່ວຍໃຫ້ທ່ານເປີດຄວາມເປັນໄປໄດ້ໃໝ່ໆສຳລັບການເຮັດວຽກອັດຕະໂນມັດທີ່ທ່ານບໍ່ເຄີຍຄິດວ່າເປັນໄປໄດ້.

ຄຸນສົມບັດ
·ການກວດຈັບການຕົກຂອງ Gripper, ຟັງຊັນຜົນຜະລິດພື້ນທີ່
· ແຮງ, ຕຳແໜ່ງ ແລະ ຄວາມໄວສາມາດຄວບຄຸມໄດ້ຢ່າງແນ່ນອນຜ່ານ Modbus
·ອາຍຸການໃຊ້ງານຍາວນານ: ຫຼາຍສິບລ້ານຮອບວຽນ, ເກີນກວ່າກົງເລັບອາກາດ
·ຕົວຄວບຄຸມໃນຕົວ: ຂະໜາດນ້ອຍ, ການເຊື່ອມໂຍງງ່າຍ
·ຮູບແບບການຄວບຄຸມ: 485 (Modbus RTU), I/O
ແຮງໜີບ, ຄວາມໄວສາມາດຄວບຄຸມໄດ້ຢ່າງຖືກຕ້ອງໂດຍ Modbus
ແອັບພລິເຄຊັນຫຼາຍອັນ
ມັນມີການກວດຈັບການຫຼຸດລົງແບບໜີບ ແລະ ຜົນຜະລິດຂອງເມືອງ
ຖືກຕ້ອງຕໍ່ການຄວບຄຸມ
ແຮງໜີບ, ບິດ, ຄວາມໄວສາມາດຄວບຄຸມໄດ້ໂດຍ Modbus
ອາຍຸຍືນຍາວ
ຮອບວຽນຫຼາຍສິບລ້ານຮອບ, ເຄື່ອງຈັບຜ່ານອາກາດ
ຕົວຄວບຄຸມໃນຕົວ
ຄອບຄອງພື້ນທີ່ນ້ອຍໆ, ສະດວກໃນການເຊື່ອມໂຍງ.
ຕອບສະໜອງໄດ້ໄວ
ເວລາທີ່ສັ້ນທີ່ສຸດຂອງການຕີເສັ້ນດຽວແມ່ນພຽງແຕ່ 0.25 ວິນາທີເທົ່ານັ້ນ
ການໜີບອ່ອນໆ
ມັນສາມາດໜີບວັດຖຸທີ່ແຕກຫັກງ່າຍເຊັ່ນ: ໄຂ່, ຈອກແກ້ວ, ແລະອື່ນໆ.




ພາລາມິເຕີສະເປັກ
Z-EFG-26 ເປັນເຄື່ອງຈັບແບບໄຟຟ້າ 2 ນິ້ວມືຂະໜານ, ມີຂະໜາດນ້ອຍແຕ່ມີປະສິດທິພາບໃນການຈັບວັດຖຸທີ່ອ່ອນຫຼາຍຊະນິດເຊັ່ນ: ໄຂ່, ທໍ່, ອົງປະກອບເອເລັກໂຕຣນິກ, ແລະອື່ນໆ.
● ເຄື່ອງຈັບໄຟຟ້າ Z-EFG-26 ມີຕົວຄວບຄຸມໃນຕົວ.
●ແຮງດຶງ ແລະ ແຮງຈັບຂອງມັນສາມາດປັບໄດ້.
●ຕົວເຊື່ອມຕໍ່ສາມາດຖືກປ່ຽນແທນເພື່ອປັບຕົວເຂົ້າກັບຄວາມຕ້ອງການຕ່າງໆ.
●ຈັບເອົາວັດຖຸທີ່ແຕກຫັກງ່າຍ ແລະ ຜິດຮູບໄດ້ງ່າຍ ເຊັ່ນ: ໄຂ່, ຫຼອດທົດລອງ, ແຫວນ, ແລະອື່ນໆ.
●ເໝາະສຳລັບສະຖານທີ່ທີ່ບໍ່ມີແຫຼ່ງອາກາດ (ເຊັ່ນ: ຫ້ອງທົດລອງ ແລະ ໂຮງໝໍ).
| ຮຸ່ນເລກທີ Z-EFG-26 | ພາລາມິເຕີ |
| ທັງໝົດ ອາການເສັ້ນເລືອດໃນສະໝອງຕີບ | 26 ມມ |
| ແຮງຈັບ | 6~15N |
| ຄວາມສາມາດໃນການເຮັດຊ້ຳໄດ້ | ±0.02 ມມ |
| ນ້ຳໜັກຈັບທີ່ແນະນຳ | ສູງສຸດ 0.3 ກິໂລກຣາມ |
| ການສົ່ງຜ່ານ ໂໝດ | ຊັ້ນເກຍ + ຄູ່ມືລໍ້ຄຣາວ |
| ການເຕີມເຕັມໄຂມັນຂອງອົງປະກອບທີ່ເຄື່ອນທີ່ | ທຸກໆຫົກເດືອນ ຫຼື 1 ລ້ານຄັ້ງຕໍ່ຄັ້ງ |
| ເວລາການເຄື່ອນໄຫວຂອງເສັ້ນໂຄ້ງທາງດຽວ | 0.25 ວິນາທີ |
| ຊ່ວງອຸນຫະພູມປະຕິບັດການ | 5-55℃ |
| ລະດັບຄວາມຊຸ່ມຊື່ນປະຕິບັດການ | RH35-80(ບໍ່ມີອາກາດໜາວ) |
| ຮູບແບບການເຄື່ອນໄຫວ | ສອງນິ້ວມືເຄື່ອນທີ່ຕາມແນວນອນ |
| ການຄວບຄຸມເສັ້ນເລືອດໃນສະໝອງຕີບ | ສາມາດປັບໄດ້ |
| ການປັບແຮງໜີບ | ສາມາດປັບໄດ້ |
| ນ້ຳໜັກ | 0.45 ກິໂລກຣາມ |
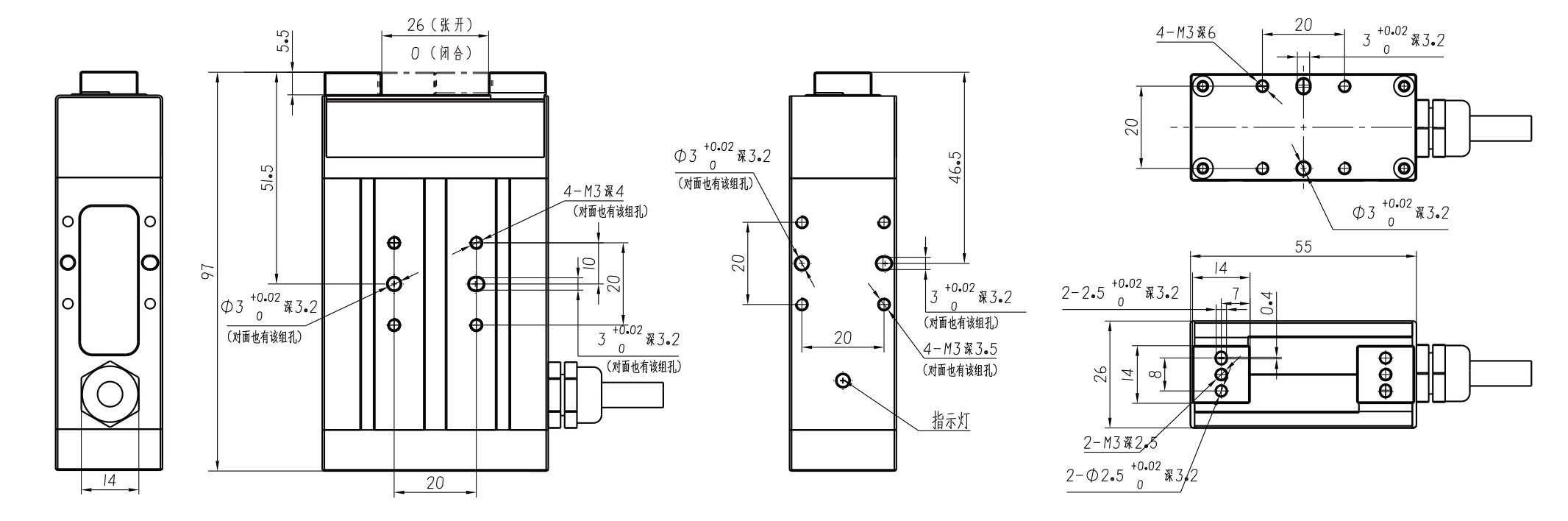
| ຂະໜາດ(ຍາວ*ກ*ສ) | 55*26*97ມມ |
| ຕຳແໜ່ງຜູ້ຄວບຄຸມ | ຕິດຕັ້ງໃນຕົວ |
| ພະລັງງານ | 10 ວັດ |
| ປະເພດມໍເຕີ | DC ແບບບໍ່ໃຊ້ແປງ |
| ກະແສໄຟຟ້າສູງສຸດ | 1A |
| ແຮງດັນໄຟຟ້າທີ່ໄດ້ຮັບການຈັດອັນດັບ | 24V |
| ກະແສໄຟຟ້າສະແຕນບາຍ | 0.4A |
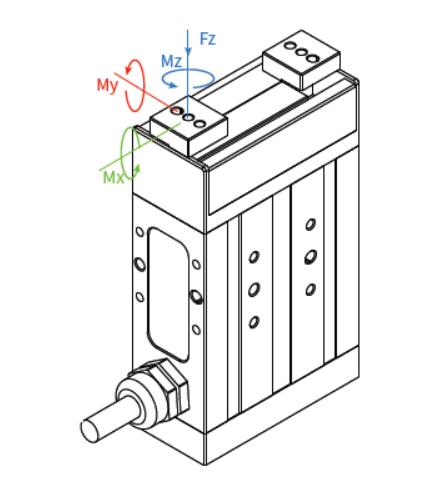
| ການໂຫຼດສະຖິດທີ່ອະນຸຍາດໃນທິດທາງຕັ້ງ | |
| ຟຊ: | 250N |
| ແຮງບິດທີ່ອະນຸຍາດ | |
| ມກ: | 2.4 ນິວຕັນແມັດ |
| ຂອງຂ້ອຍ: | 2.6 ນິວຕັນແມັດ |
| ມຊ: | 2 ນິວຕັນແມັດ |
ການຄວບຄຸມແຮງແມ່ນຍໍາ ຄວາມແມ່ນຍໍາໃນການເຮັດຊ້ຳອີກ

ເຄື່ອງຈັບໄຟຟ້າໄດ້ຮັບຮອງເອົາການອອກແບບລະບົບສົ່ງກຳລັງພິເສດ ແລະ ການຄິດໄລ່ການຂັບຂີ່ເພື່ອຊົດເຊີຍ, ຈັງຫວະທັງໝົດຂອງມັນແມ່ນ 26 ມມ, ແຮງໜີບແມ່ນ 6-15N, ຈັງຫວະ ແລະ ແຮງໜີບສາມາດປັບໄດ້, ແລະ ຄວາມສາມາດໃນການເຮັດຊ້ຳຄືນຂອງມັນແມ່ນ ±0.02 ມມ.
ປະຕິກິລິຍາໄວ, ໝັ້ນຄົງກວ່າ

ເວລາທີ່ສັ້ນທີ່ສຸດຂອງການດຶງເສັ້ນດຽວແມ່ນພຽງແຕ່ 0.25 ວິນາທີ, ມັນສາມາດຕອບສະໜອງຄວາມຕ້ອງການການໜີບທີ່ໄວ ແລະ ໝັ້ນຄົງສຳລັບສາຍການຜະລິດ.
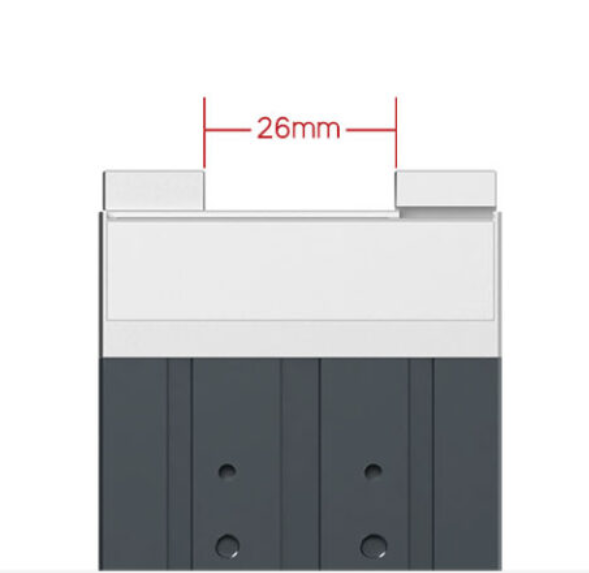
ຂະໜາດນ້ອຍ, ເຊື່ອມຕໍ່ໄດ້ງ່າຍ

ຂະໜາດຂອງ Z-EFG-26 ແມ່ນ L55 * W26 * H97 ມມ, ໂຄງສ້າງຂອງມັນມີຂະໜາດກະທັດຮັດ, ຮອງຮັບຮູບແບບການຕິດຕັ້ງທີ່ມີຄວາມຍືດຫຍຸ່ນຫຼາຍກວ່າຫ້າຮູບແບບ, ມັນມີຕົວຄວບຄຸມໃນຕົວ, ພື້ນທີ່ນ້ອຍ, ມັນສາມາດຈັດການກັບວຽກງານຫຼາຍຢ່າງໄດ້ງ່າຍສຳລັບຄວາມຕ້ອງການການໜີບຕ່າງໆ.

ການຂັບເຄື່ອນແບບປະສົມປະສານ ແລະ ຕົວຄວບຄຸມແບບໜີບອ່ອນ

ສ່ວນຫາງຂອງກຣິບເປີໄຟຟ້າສາມາດປ່ຽນແປງໄດ້ຢ່າງສະບາຍ, ນ້ຳໜັກໜີບຂອງມັນແມ່ນ 300 ກຣາມ, ລູກຄ້າສາມາດອອກແບບສ່ວນຫາງຂອງກຣິບເປີເປັນພິເສດເພື່ອຕອບສະໜອງວັດຖຸໜີບຂອງຕົນເອງ, ເພື່ອຮັກສາກຣິບເປີໄຟຟ້າສາມາດເຮັດສຳເລັດວຽກງານໜີບໄດ້ຫຼາຍທີ່ສຸດ.
ຮູບແບບການຄວບຄຸມແບບຄູນ, ງ່າຍຕໍ່ການໃຊ້ງານ

ການຕັ້ງຄ່າຂອງກຣິບເປີ Z-EFG-26 ແມ່ນງ່າຍດາຍ, ມັນມີຮູບແບບການຄວບຄຸມທີ່ອຸດົມສົມບູນ: 485 (Modbus RTU), Pulse, I/O, ມັນເຂົ້າກັນໄດ້ກັບລະບົບຄວບຄຸມຫຼັກ PLC.

ແຜນວາດການຕິດຕັ້ງຂະໜາດ
ທຸລະກິດຂອງພວກເຮົາ







