ເຄື່ອງກຳເນີດສູນຍາກາດແບບຮ່ວມມືສອງນິ້ວມືແບບກຣິບເປີອ່ອນສຳລັບລະບົບອັດຕະໂນມັດຂອງຫຸ່ນຍົນ



ເຄື່ອງກຳເນີດສູນຍາກາດແບບຮ່ວມມືສອງນິ້ວມືແບບກຣິບເປີອ່ອນສຳລັບລະບົບອັດຕະໂນມັດຂອງຫຸ່ນຍົນ
ໝວດໝູ່ຫຼັກ
ແຂນຫຸ່ນຍົນອຸດສາຫະກຳ / ແຂນຫຸ່ນຍົນຮ່ວມມື / ກຣິບເປີໄຟຟ້າ / ຕົວກະຕຸ້ນອັດສະລິຍະ / ວິທີແກ້ໄຂອັດຕະໂນມັດ
ແອັບພລິເຄຊັນ

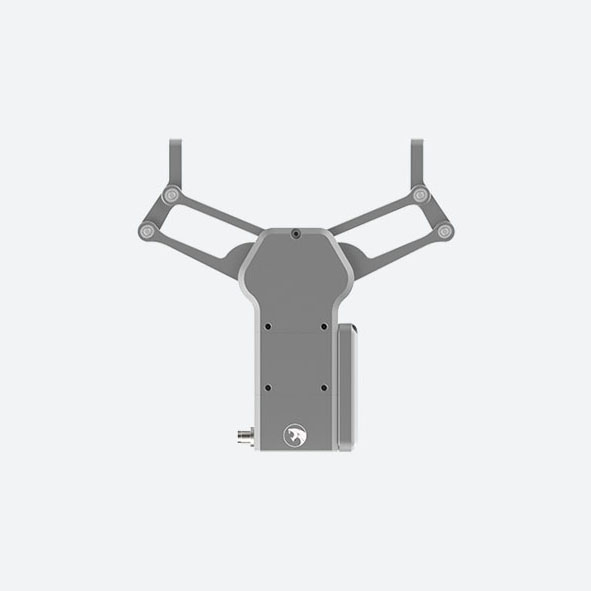
ເຄື່ອງຈັບຫຸ່ນຍົນຊຸດ SCIC Z-EFG ມີຂະໜາດນ້ອຍພ້ອມດ້ວຍລະບົບ servo ໃນຕົວ, ເຊິ່ງເຮັດໃຫ້ສາມາດຄວບຄຸມຄວາມໄວ, ຕຳແໜ່ງ ແລະ ແຮງໜີບໄດ້ຢ່າງແນ່ນອນ. ລະບົບຈັບທີ່ທັນສະໄໝຂອງ SCIC ສຳລັບວິທີແກ້ໄຂອັດຕະໂນມັດຈະຊ່ວຍໃຫ້ທ່ານເປີດຄວາມເປັນໄປໄດ້ໃໝ່ໆສຳລັບການເຮັດວຽກອັດຕະໂນມັດທີ່ທ່ານບໍ່ເຄີຍຄິດວ່າເປັນໄປໄດ້.
ຄຸນສົມບັດ
· ເສັ້ນເລືອດຕັນໃນຂະໜາດໃຫຍ່
· ແຮງໜີບທີ່ສາມາດປັບໄດ້ ແລະ ຈັງຫວະທີ່ສາມາດປັບໄດ້
·ອາຍຸການໃຊ້ງານຍາວນານ: ຫຼາຍສິບລ້ານຮອບວຽນ, ເກີນກວ່າກົງເລັບອາກາດ
·ຕົວຄວບຄຸມໃນຕົວ: ຂະໜາດນ້ອຍ, ການເຊື່ອມໂຍງງ່າຍ
·ການຄວບຄຸມລົດເມ EIA485, ການສົ່ງສັນຍານເຂົ້າ/ອອກ
ແຮງໜີບ: 40-130N, ຮູບຊົງ Y ຂອງກຣິບເປີໄຟຟ້າທີ່ມີເສັ້ນເລືອດຕັນໃນ 120 ມມ
ເສັ້ນເລືອດໃນສະໝອງຕີບຍາວ
ເສັ້ນເລືອດໃນສະໝອງທັງໝົດ: 120 ມມ
ໂໝດຄວບຄຸມ
485 Modbus, EIA485, ການຄວບຄຸມລົດເມ
ແຮງໜີບ
ແຮງໜີບ 40-130N ສາມາດປັບໄດ້
ຕົວຄວບຄຸມພາຍໃນ
ການເຊື່ອມໂຍງພື້ນທີ່ຂະໜາດນ້ອຍ, ງ່າຍຕໍ່ການເຊື່ອມໂຍງເຂົ້າກັນ
ການຄວບຄຸມຄວາມແມ່ນຍຳ
ການເຮັດຊ້ຳໄດ້: ±0.02 ມມ
ການໜີບອ່ອນໆ
ມັນສາມາດໜີບວັດຖຸທີ່ແຕກຫັກງ່າຍ ແລະ ບິດເບືອນໄດ້

● ສົ່ງເສີມການປະຕິວັດໃນການທົດແທນກຣິບເປີລົມດ້ວຍກຣິບເປີໄຟຟ້າ, ກຣິບເປີໄຟຟ້າເຄື່ອງທຳອິດທີ່ມີລະບົບ servo ປະສົມປະສານໃນປະເທດຈີນ.
● ການທົດແທນທີ່ສົມບູນແບບສຳລັບເຄື່ອງອັດອາກາດ + ຕົວກອງ + ວາວໂຊລີນອຍ + ວາວຄວບຄຸມຄວາມໄວ + ກຣິບເຕີລົມ
● ອາຍຸການໃຊ້ງານຫຼາຍຮອບວຽນ, ສອດຄ່ອງກັບກະບອກສູບແບບດັ້ງເດີມຂອງຍີ່ປຸ່ນ



ພາລາມິເຕີສະເປັກ
| ຮຸ່ນເລກທີ Z-EFG-130 | ພາລາມິເຕີ |
| ທັງໝົດ ອາການເສັ້ນເລືອດໃນສະໝອງຕີບ | 120 ມມ |
| ແຮງຈັບ | 40-130N |
| ຄວາມສາມາດໃນການເຮັດຊ້ຳໄດ້ | ±0.02 ມມ |
| ນ້ຳໜັກຈັບທີ່ແນະນຳ | ສູງສຸດ 1 ກິໂລກຣາມ |
| ການສົ່ງຜ່ານ ໂໝດ | ນັອດສະກູ + ຕົວເຊື່ອມຕໍ່ |
| ການເຕີມເຕັມໄຂມັນຂອງອົງປະກອບທີ່ເຄື່ອນທີ່ | ທຸກໆຫົກເດືອນ ຫຼື 1 ລ້ານຄັ້ງຕໍ່ຄັ້ງ |
| ເວລາການເຄື່ອນໄຫວຂອງເສັ້ນໂຄ້ງທາງດຽວ | 0.9 ວິນາທີ |
| ຊ່ວງອຸນຫະພູມປະຕິບັດການ | 5-55℃ |
| ລະດັບຄວາມຊຸ່ມຊື່ນປະຕິບັດການ | RH35-80(ບໍ່ມີອາກາດໜາວ) |
| ຮູບແບບການເຄື່ອນໄຫວ | ການເຊື່ອມໂຍງ |
| ການຄວບຄຸມເສັ້ນເລືອດໃນສະໝອງຕີບ | ສາມາດປັບໄດ້ |
| ການປັບແຮງໜີບ | ສາມາດປັບໄດ້ |
| ນ້ຳໜັກ | 0.8 ກິໂລກຣາມ |
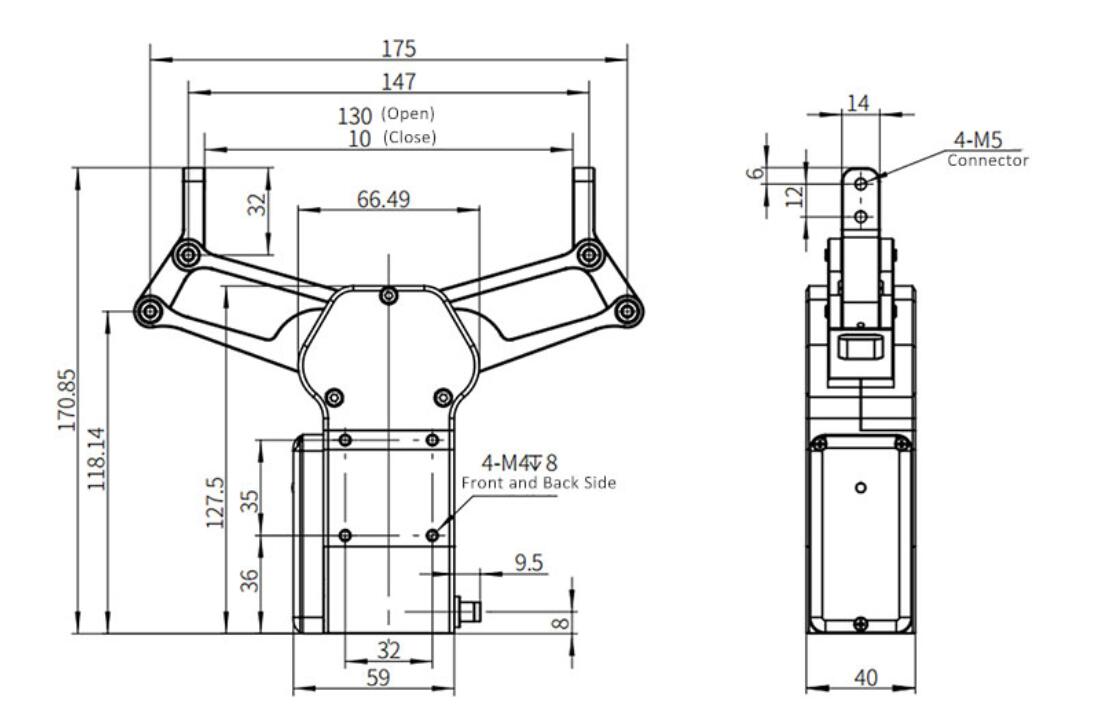
| ຂະໜາດ(ຍາວ*ກ*ສ) | 171*187*40 ມມ (ເປີດ) 218*66.5*40 ມ (ປິດ) |
| ຕຳແໜ່ງຜູ້ຄວບຄຸມ | ຕິດຕັ້ງໃນຕົວ |
| ພະລັງງານ | 10 ວັດ |
| ປະເພດມໍເຕີ | DC ແບບບໍ່ໃຊ້ແປງ |
| ກະແສໄຟຟ້າສູງສຸດ | 2A |
| ແຮງດັນໄຟຟ້າທີ່ໄດ້ຮັບການຈັດອັນດັບ | 24V |
| ກະແສໄຟຟ້າສະແຕນບາຍ | 0.4A |
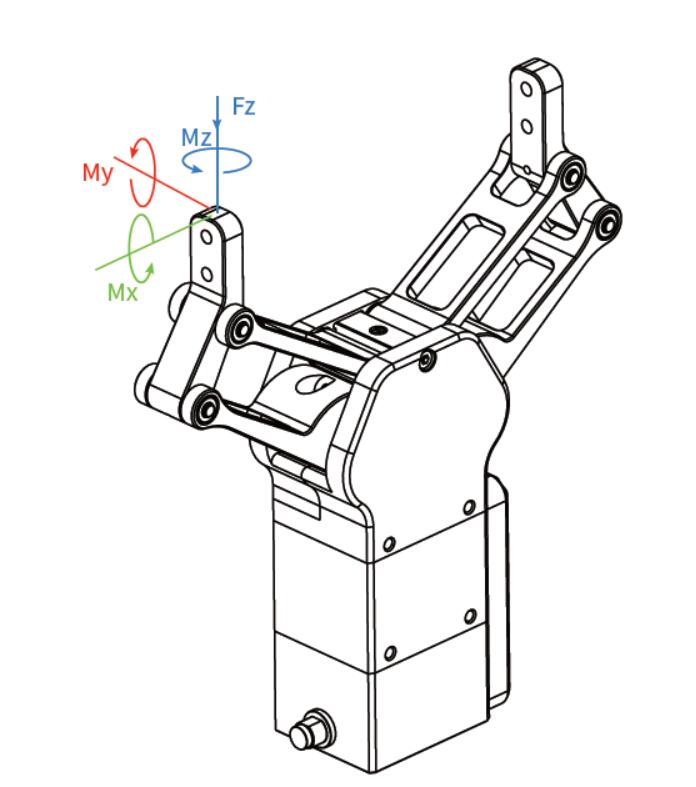
| ການໂຫຼດສະຖິດທີ່ອະນຸຍາດໃນທິດທາງຕັ້ງ | |
| ຟຊ: | 200N |
| ແຮງບິດທີ່ອະນຸຍາດ | |
| ມກ: | 2 ນິວຕັນແມັດ |
| ຂອງຂ້ອຍ: | 2 ນິວຕັນແມັດ |
| ມຊ: | 2 ນິວຕັນແມັດ |
ສຽບແລະຫຼິ້ນ, ສະດວກໃນການເຊື່ອມໂຍງ
ເຄື່ອງມືຈັບໄຟຟ້າ Z-EFG-130 ສາມາດເຂົ້າກັນໄດ້ກັບແຂນຫຸ່ນຍົນຮ່ວມມື, ແລະມັນມີລະບົບ servo ປະສົມປະສານພາຍໃນ, ມີພຽງເຄື່ອງມືຈັບດຽວເທົ່ານັ້ນທີ່ສາມາດເທົ່າກັບເຄື່ອງອັດອາກາດ + ຕົວກອງ + ວາວໂຊລີນອຍ + ວາວຄວບຄຸມ + ເຄື່ອງມືຈັບອາກາດ.


ເສັ້ນເລືອດຍາວ, ຄວາມເຂົ້າກັນໄດ້ທີ່ດີເລີດ
ຂະໜາດຂອງຕົວຈັບໄຟຟ້າທີ່ມີປະສິດທິພາບສາມາດສູງເຖິງ 120 ມມ, ຂະໜາດປິດຂອງມັນແມ່ນ 10 ມມ, ຕົວຈັບໄຟຟ້າສາມາດໃຊ້ສຳລັບຊິບເຄິ່ງຕົວນຳ, ເອເລັກໂຕຣນິກ 3C ແລະ ອຸດສາຫະກຳຄວາມແມ່ນຍຳອື່ນໆ, ແລະອື່ນໆ.
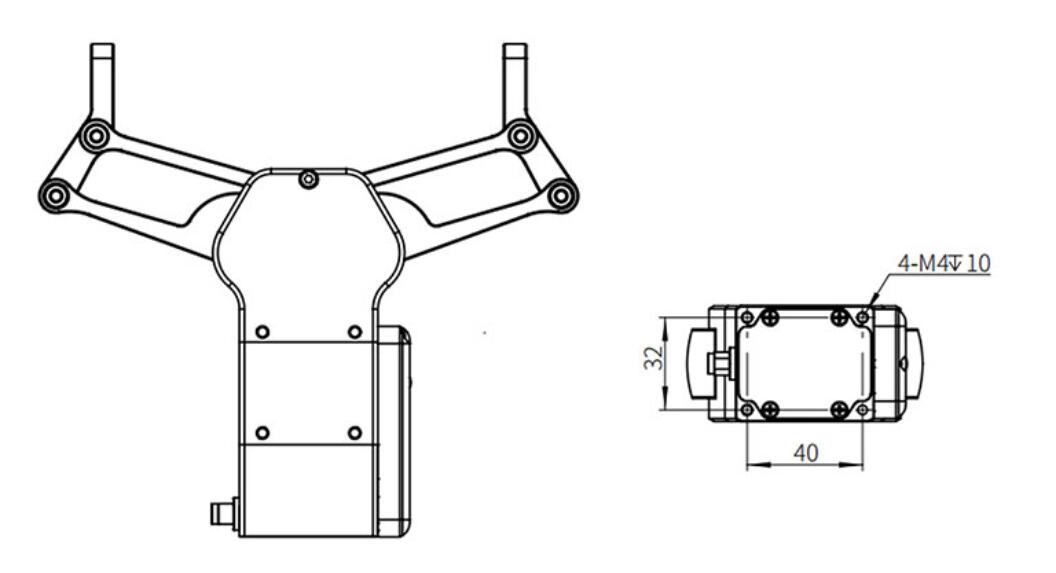
ຂະໜາດນ້ອຍ, ສະດວກໃນການເຊື່ອມໂຍງ

ຂະໜາດເປີດຂອງ Z-EFG-130 ແມ່ນ 171*187*40 ມມ, ຂະໜາດປິດແມ່ນ 218*66.5*40 ມມ, ມັນມີໂຄງສ້າງທີ່ກະທັດຮັດ, ຮອງຮັບການຕິດຕັ້ງຫຼາຍປະເພດ, ມັນເປັນຕົວຄວບຄຸມພາຍໃນ, ກວມເອົາພື້ນທີ່ຂະໜາດນ້ອຍ.

ການຄວບຄຸມແຮງຄວາມແມ່ນຍຳ
ເຄື່ອງຈັບໄຟຟ້າແມ່ນເພື່ອນຳໃຊ້ການອອກແບບລະບົບສົ່ງກຳລັງພິເສດ ແລະ ການຊົດເຊີຍອັລກໍຣິທຶມການຂັບເຄື່ອນ, ແຮງໜີບແມ່ນສາມາດປັບໄດ້ 40-130N, ນ້ຳໜັກໜີບຄຳແນະນຳ ≤1kg, ແລະ ມັນສາມາດຮັບຮູ້ຄວາມສາມາດໃນການເຮັດຊ້ຳໄດ້ ±0.02 ມມ.
ຈັບແບບປັບຕົວໄດ້, ຫາງສາມາດປ່ຽນໄດ້

ເຄື່ອງຈັບໄຟຟ້າຂອງ Z-EFG-130 ຮອງຮັບການໜີບແບບປັບຕົວໄດ້, ມັນເໝາະສົມກວ່າສຳລັບວັດຖຸຮູບວົງມົນ, ວັດຖຸກົມ ຫຼື ວັດຖຸທີ່ມີຮູບຮ່າງພິເສດ, ສ່ວນຫາງຂອງມັນສາມາດປ່ຽນແປງໄດ້ຢ່າງສະບາຍ, ລູກຄ້າສາມາດໜີບວັດຖຸໄດ້ຕາມຄວາມຕ້ອງການຂອງເຂົາເຈົ້າ.


ຮູບແບບການຄວບຄຸມຫຼາຍຄູນ, ງ່າຍຕໍ່ການໃຊ້ງານ

ເຄື່ອງຈັບໄຟຟ້າສາມາດຄວບຄຸມຄວາມແມ່ນຍຳໄດ້ໂດຍ Modbus, ການຕັ້ງຄ່າຂອງມັນແມ່ນງ່າຍດາຍ, ເພື່ອນຳໃຊ້ໂປໂຕຄອນການສື່ສານຂອງ Digital I/O, ພຽງແຕ່ຕ້ອງການສາຍດຽວເພື່ອເຊື່ອມຕໍ່ກັບ ON/OFF, ມັນເຂົ້າກັນໄດ້ກັບລະບົບຄວບຄຸມຫຼັກ PLC.
ຈຸດສູນກາງແຮງໂນ້ມຖ່ວງຂອງການໂຫຼດ
ທຸລະກິດຂອງພວກເຮົາ






