ຊຸດກຣິບເປີໄຟຟ້າ HITBOT – ກຣິບເປີໄຟຟ້າຂະໜານ Z-EFG-20


ໝວດໝູ່ຫຼັກ
ແຂນຫຸ່ນຍົນອຸດສາຫະກຳ / ແຂນຫຸ່ນຍົນຮ່ວມມື / ກຣິບເປີໄຟຟ້າ / ຕົວກະຕຸ້ນອັດສະລິຍະ / ວິທີແກ້ໄຂອັດຕະໂນມັດ
ແອັບພລິເຄຊັນ
ເຄື່ອງຈັບຫຸ່ນຍົນຊຸດ SCIC Z-EFG ມີຂະໜາດນ້ອຍພ້ອມດ້ວຍລະບົບ servo ໃນຕົວ, ເຊິ່ງເຮັດໃຫ້ສາມາດຄວບຄຸມຄວາມໄວ, ຕຳແໜ່ງ ແລະ ແຮງໜີບໄດ້ຢ່າງແນ່ນອນ. ລະບົບຈັບທີ່ທັນສະໄໝຂອງ SCIC ສຳລັບວິທີແກ້ໄຂອັດຕະໂນມັດຈະຊ່ວຍໃຫ້ທ່ານເປີດຄວາມເປັນໄປໄດ້ໃໝ່ໆສຳລັບການເຮັດວຽກອັດຕະໂນມັດທີ່ທ່ານບໍ່ເຄີຍຄິດວ່າເປັນໄປໄດ້.

ຄຸນສົມບັດ

· ຕົວຄວບຄຸມໃນຕົວ
· ແຮງດຶງ ແລະ ແຮງຈັບທີ່ສາມາດປັບໄດ້
· ປາຍສາມາດປ່ຽນແທນໄດ້ເພື່ອປັບຕົວເຂົ້າກັບຄວາມຕ້ອງການຕ່າງໆ
· ເກັບວັດຖຸທີ່ແຕກຫັກງ່າຍ ແລະ ຜິດປົກກະຕິໄດ້ ເຊັ່ນ: ໄຂ່,ທໍ່ທົດສອບ, ແຫວນ, ແລະອື່ນໆ.
· ນຳໃຊ້ສຳລັບສະຖານທີ່ທີ່ບໍ່ມີແຫຼ່ງອາກາດ (ເຊັ່ນ: ຫ້ອງທົດລອງ, ໂຮງໝໍ)
ຄວາມແມ່ນຍຳໃນການຄວບຄຸມ, ເພື່ອໜີບໃນພື້ນທີ່ຂະໜາດນ້ອຍ ໄວ ແລະ ໝັ້ນຄົງໃນການໜີບ
ແຮງໜີບໃຫຍ່
ເສັ້ນເລືອດໃນສະໝອງທັງໝົດແມ່ນ 20 ມມ, ແຮງໜີບແມ່ນ 80N.
ຄວາມແມ່ນຍຳໃນການຄວບຄຸມ
ການເຮັດຊ້ຳໄດ້: ±0.02 ມມ
ອາຍຸຍືນຍາວ
ຫຼາຍສິບລ້ານຮອບວຽນ, ອັນດັບຂອງເຄື່ອງກຣິບເປີອາກາດ
ຕົວຄວບຄຸມມີໃນຕົວ
ພື້ນທີ່ນ້ອຍ, ສະດວກໃນການເຊື່ອມໂຍງ.
ໂໝດຄວບຄຸມ
ຕົວຄວບຄຸມ Pulse, I/O ສຳລັບທາງເລືອກ
ການໜີບອ່ອນໆ
ມັນສາມາດໜີບວັດຖຸທີ່ແຕກຫັກງ່າຍໄດ້




ພາລາມິເຕີສະເປັກ
| ລຸ້ນເລກທີ່ Z-EFG-20 | ພາລາມິເຕີ |
| ທັງໝົດ ອາການເສັ້ນເລືອດໃນສະໝອງຕີບ | 20 ມມ |
| ແຮງຈັບ | 30~80N |
| ຄວາມສາມາດໃນການເຮັດຊ້ຳໄດ້ | ±0.02 ມມ |
| ນ້ຳໜັກຈັບທີ່ແນະນຳ | 0.8 ກິໂລກຣາມ |
| ການສົ່ງຜ່ານ ໂໝດ | ຊັ້ນເກຍ + ຄູ່ມືລໍ້ຄຣາວ |
| ການເຕີມເຕັມໄຂມັນຂອງອົງປະກອບທີ່ເຄື່ອນທີ່ | ທຸກໆຫົກເດືອນ ຫຼື 1 ລ້ານຄັ້ງຕໍ່ຄັ້ງ |
| ເວລາການເຄື່ອນໄຫວຂອງເສັ້ນໂຄ້ງທາງດຽວ | 0.45 ວິນາທີ |
| ຊ່ວງອຸນຫະພູມປະຕິບັດການ | 5-55℃ |
| ລະດັບຄວາມຊຸ່ມຊື່ນປະຕິບັດການ | RH35-80(ບໍ່ມີອາກາດໜາວ) |
| ຮູບແບບການເຄື່ອນໄຫວ | ສອງນິ້ວມືເຄື່ອນທີ່ຕາມແນວນອນ |
| ການຄວບຄຸມເສັ້ນເລືອດໃນສະໝອງຕີບ | ສາມາດປັບໄດ້ |
| ການປັບແຮງໜີບ | ສາມາດປັບໄດ້ |
| ນ້ຳໜັກ | 0.458 ກິໂລກຣາມ |
| ຂະໜາດ(ຍາວ*ກ*ສ) | 44*30*124.7 ມມ |
| ຕຳແໜ່ງຜູ້ຄວບຄຸມ | ຕິດຕັ້ງໃນຕົວ |
| ພະລັງງານ | 5W |
| ປະເພດມໍເຕີ | DC ແບບບໍ່ໃຊ້ແປງ |
| ກະແສໄຟຟ້າສູງສຸດ | 1A |
| ແຮງດັນໄຟຟ້າທີ່ໄດ້ຮັບການຈັດອັນດັບ | 24V |
| ກະແສໄຟຟ້າສະແຕນບາຍ | 0.2A |
| ທົນທານຕໍ່ແຮງກະແທກ / ທົນທານຕໍ່ການສັ່ນສະເທືອນ | 98 ແມັດ/ວິນາທີ |
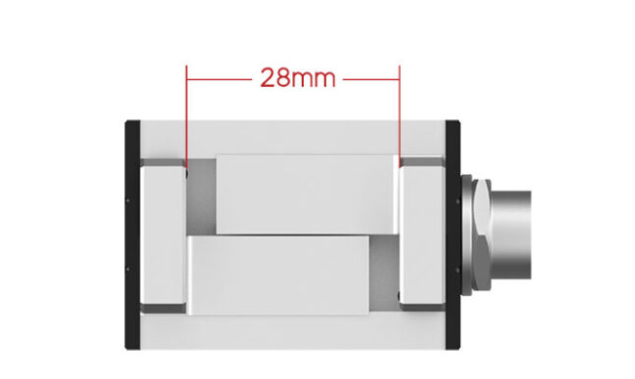
| ເສັ້ນຜ່າສູນກາງມໍເຕີ | 28 ມມ |
* ແຮງຈັບ Z-EFG-20: ແຮງຈັບສາມາດປັບໄດ້ໂດຍການເພີ່ມວັດສະດຸປ່ຽນຮູບທີ່ຄວບຄຸມໄວ້ທາງໜ້າຂອງອຸປະກອນ, ເຊິ່ງໄດ້ຮັບຕາມເສັ້ນໂຄ້ງຂອງການປ່ຽນຮູບ ແລະ ແຮງທີ່ສອດຄ້ອງກັນ.
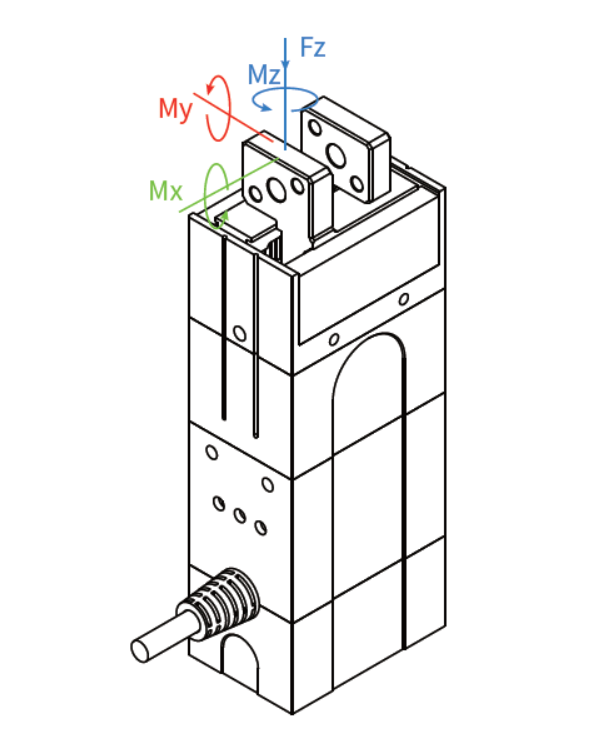
| ການໂຫຼດສະຖິດທີ່ອະນຸຍາດໃນທິດທາງຕັ້ງ | |
| ຟຊ: | 150N |
| ແຮງບິດທີ່ອະນຸຍາດ | |
| ມກ: | 2.1 ນິວຕັນແມັດ |
| ຂອງຂ້ອຍ: | 2.34 ນິວຕັນແມັດ |
| ມຊ: | 2 ນິວຕັນແມັດ |
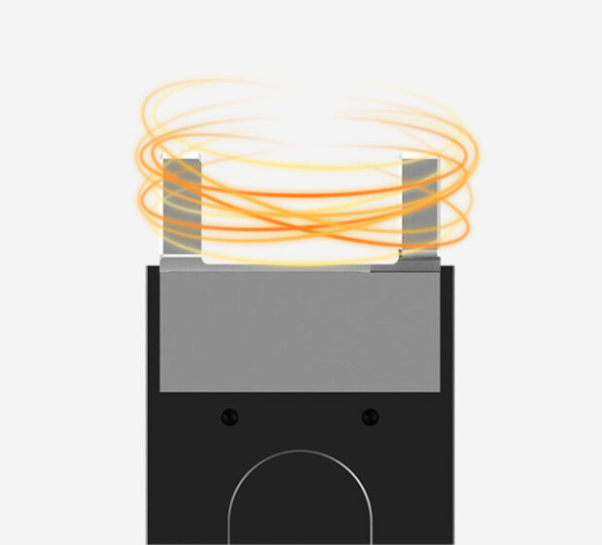
ແຮງໜີບໃຫຍ່, ການຄວບຄຸມແຮງທີ່ຖືກຕ້ອງ

ເຄື່ອງຈັບໄຟຟ້າແມ່ນຮັບຮອງເອົາການອອກແບບລະບົບສົ່ງກຳລັງພິເສດ ແລະ ການຊົດເຊີຍການຄິດໄລ່ການຂັບຂີ່, ແຮງໜີບຂອງມັນແມ່ນ 80N ສາມາດປັບໄດ້ຢ່າງຕໍ່ເນື່ອງ, ການເຄື່ອນໄຫວທັງໝົດແມ່ນ 20 ມມ, ຄວາມສາມາດໃນການເຮັດຊ້ຳອີກແມ່ນ ±0.02 ມມ.
ຮູບແບບການເຄື່ອນໄຫວ ແລະ ການປັບລະດັບຄວາມຊັນໄດ້
ການເຄື່ອນໄຫວຂອງເຄື່ອງຈັບໄຟຟ້າເປັນຂອງການເຄື່ອນໄຫວຂະໜານສອງນິ້ວມື, ເວລາທີ່ສັ້ນທີ່ສຸດຂອງການຕີຄັ້ງດຽວແມ່ນພຽງແຕ່ 0.45 ວິນາທີ, ນ້ຳໜັກໜີບ ≤0.8 ກິໂລກຣາມ, ມັນສາມາດຕອບສະໜອງຄວາມຕ້ອງການຂອງການໜີບທີ່ໝັ້ນຄົງສຳລັບສາຍການຜະລິດ.
ໂຄງສ້າງກະທັດຮັດ, ມີຄວາມຍືດຫຍຸ່ນໃນການຕິດຕັ້ງ.

ຂະໜາດຂອງ Z-EFG-20 ແມ່ນ L40*W30*H124.7 ມມ, ໂຄງສ້າງຂອງມັນມີຂະໜາດກະທັດຮັດ, ຮອງຮັບຫຼາຍກວ່າຫ້າຮູບແບບການຕິດຕັ້ງ, ຕົວຄວບຄຸມຂອງມັນຖືກຕິດຕັ້ງໃນຕົວ, ໃຊ້ພື້ນທີ່ນ້ອຍໆ, ເຊິ່ງສາມາດປະຕິບັດໜ້າວຽກໜີບຕ່າງໆໄດ້ງ່າຍ.


ການຂັບຂີ່ ແລະ ຕົວຄວບຄຸມປະສົມປະສານ, ການໜີບທີ່ອ່ອນນຸ້ມ

ຫາງຂອງ Z-EFG-20 ສາມາດປ່ຽນແປງໄດ້ຢ່າງສະບາຍ, ລູກຄ້າສາມາດໜີບວັດຖຸທີ່ຕ້ອງການຂອງເຂົາເຈົ້າ, ເພື່ອອອກແບບຫາງ, ແລະຮັກສາເຄື່ອງຈັບໄຟຟ້າເພື່ອເຮັດສຳເລັດວຽກງານໜີບໃນລະດັບສູງສຸດ.
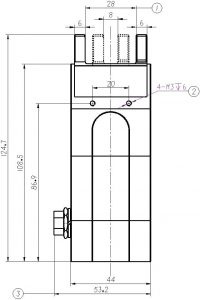
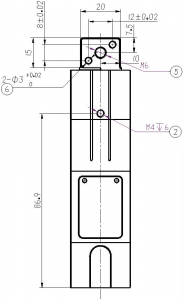
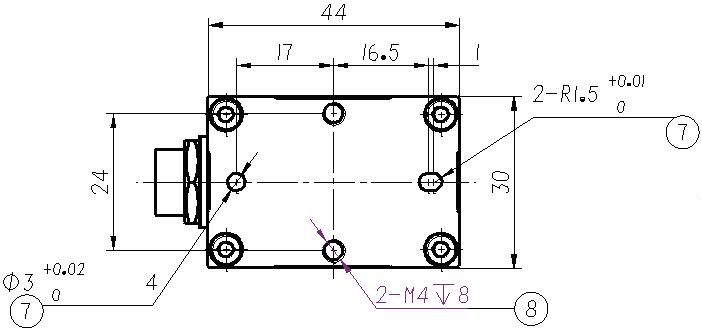
ແຜນວາດການຕິດຕັ້ງຂະໜາດ
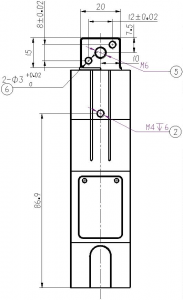
① ການເຄື່ອນໄຫວຂອງນິ້ວມືຈັບ
② ຕຳແໜ່ງຕິດຕັ້ງດ້ານຂ້າງ (ຮູເກລียว)
③ ສະຖານທີ່ເຊື່ອມຕໍ່ສາຍໄຟຂອງປລັກໄຟເຮືອບິນ
④ ຕຳແໜ່ງຂອງແຮງປັບຂອງກຣິບເປີ (ຊ້າຍ) ແລະ ໄຟສະແດງ (ຂວາ)
⑤ ຕຳແໜ່ງຕິດຕັ້ງ Gripper (ຮູເກລียว)
⑥ ຕຳແໜ່ງຕິດຕັ້ງ Gripper (ຮູເຂັມ)
⑦ ຕຳແໜ່ງຕິດຕັ້ງດ້ານລຸ່ມ (ຮູເຂັມ)
⑧ ຕຳແໜ່ງຕິດຕັ້ງດ້ານລຸ່ມ ((ຮູເກລียว)
ທຸລະກິດຂອງພວກເຮົາ







